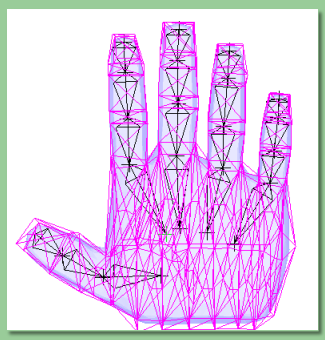
逆向き制御の重みのダイアログが表示されるはずです。逆向き制御は Inverse Kinematics (IK) とも言い、その骨と根の間にある骨が自動的に、骨のつながりの遠い方の骨に追従するよう参照します。逆向き制御の重みで、頂点を骨に固定する方法を定義します。詳しくは三角メッシュのチュートリアルとマニュアルをご覧ください。デフォルト値の 0.5 は初期値として大抵は問題ないので、このままでいきましょう。
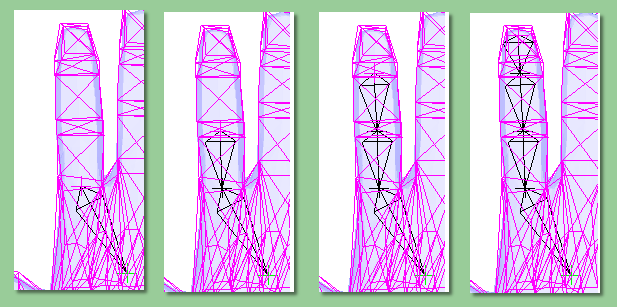
今後は骨格を動かすと、メッシュが一緒に動きます。やってみましょう。まずファイルを保存してから、「骨格を編集」アイコンをクリックして骨格ツールを起動します。骨の端の点をクリックしてドラッグしてみてください。その骨に合わせてメッシュが動きます。しかしすぐに、骨がどこに動くか決められないという問題に気づくでしょう。リアルで制御可能な骨格にするため、骨の動作を制限する必要があります。
