小惑星イトカワを探査した日本の探査機 はやぶさ(MUSES-C)には、NASA の小型ローバー "MUSES-CN" が同乗するはずでした。しかし MUSES CN の開発は頓挫して、代わりに日本製ローバー "MINERVA" が搭載されました。
そんな幻の NASA ローバー・MUSES-CN を紹介する文書が見つかったので、日本語訳してみました(英語の原典はコチラ)
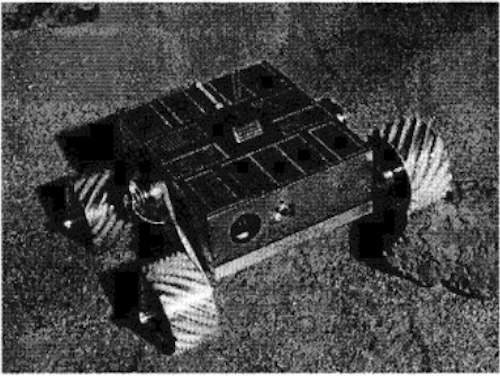
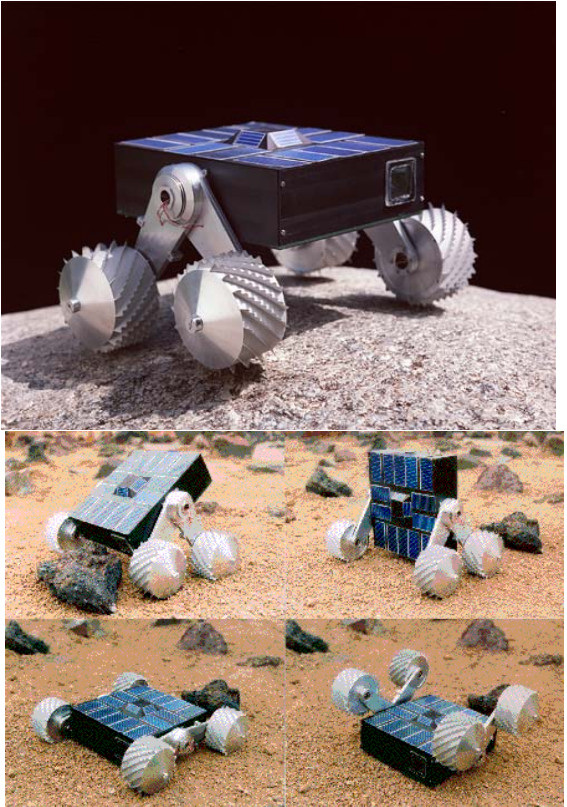
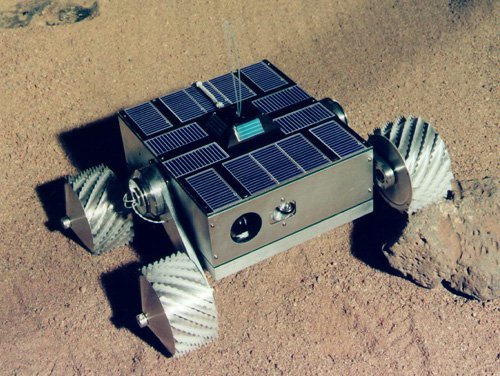
とりあえずプロトタイプの画像をどうぞ。こんな形のローバーでした。
では、以下がその文書の日本語訳です。
MUSES CN ローバーと小惑星探査ミッション
Ross Jones
ジェット推進研究所
カリフォルニア工科大学第22回 宇宙技術・科学における国際シンポジウム
盛岡市 日本
2000年5月28日〜6月4日MUSES CN ローバーと小惑星探査ミッション
概念
NASA と日本の宇宙科学研究所(ISAS)は、小惑星表面からサンプル回収して地球に持ち帰る最初のミッションでの詳細な共同研究を合意した。MUSES C ミッションは日本の MV により、日本にある鹿児島宇宙センター(訳註: 内之浦宇宙空間観測所のこと)2002年7月に打ち上げられ、2003年9月に小惑星 1989ML へのタッチダウンに向かう。NASA が提供する小型ローバーにより、表面にて現地測定を行う。MUSES C がパラシュート付き再突入カプセルで小惑星サンプルを地球に持ち帰るのは2006年6月となる。
NASA と ISAS はミッションのいくつかの局面で協力する。これにはミッション佐保ポートと化学分析が含まれる。さらにローバー提供において NASA は MUSES C 再突入ヒートシールド試験を、NASA のエイムズリサーチセンターに手配した。これにより宇宙機のディープスペースネットワーク追跡 提供、宇宙機のナビゲーションを補佐し、また再突入カプセルのアメリカ国内の地点への着陸を手配する可能性もある。アメリカと日本との科学的共同調査では、ローバーと宇宙機の機器のデータが共有される。回収されたサンプルもまた共同調査する。
ローバーの質量は 1kg で、実験はソジャーナローバーで確立された技術を直接の後継である。ローバーには以下の3つの科学観測機器が搭載される。視覚画像カメラ、近赤外分光器、(可能ならば)アルファX線分光器。太陽電池電源のローバーは 1989ML 表面上を移動し、画像データを収集する、宇宙機での探査を補完する。画像取得システムには表面の性質、構成、形態論的測定について解像度 1mm 以上の能力がある。ローバーはデータを宇宙機に送信し、宇宙機は地球へ中継する。もし 1989ML の微小重力環境のせいでローバーがひっくり返っても問題ないように設計されている。ローバーの4面にある太陽電池パネルで、充分な電力を保証して、機体自身をひっくり返すのに必要なモーターの稼働を常時可能にする。可動式支柱により、ローバーは車体を適切な位置に調整し、カメラを真下の表惑星表面向けても、真上の空に向けても問題がない。本稿では、ローバーのミッション、科学的目標、および現状について詳しく説明する。
1.0 序
NASAとISASは、両宇宙機関の相互利益のために、ISAS MUSES C ミッションで協力することで原則合意した。現在この協力には、既存の MUSES C ミッションに加えて、以下の要素が含まれる。NASA は以下を計画している。
- 1) 小惑星表面で使用するローバーを製造し ISAS に納入
- 2) コマンド送信、テレメトリ取得、航法のため DSN アンテナ時間を提供
- 3) 航法解析とミッションの重要な段階における設計を提供
- 4) エイムズ研究センターの施設で MUSES C の耐熱シールドの試験と設計レビューを支援
- 5) アメリカ本土での MUSES C サンプルカプセルの回収を手配
- 6) MUSES C 探査機搭載機器の共同研究者を提供
ISASは以下を計画している。
- 1) NASAのローバーを小惑星に輸送
- 2) 科学的に価値のあるローバーミッションを可能にするミッション設計を提供
- 3) 採取した試料の一部を NASA に提供
- 4) NASA の研究者が日本にて ISAS の同僚と共同でサンプル資源を分析できるようにする
- 5) NASA ローバーに搭載される機器の共同研究者を提供
ISAS のMUSES Cミッションについては、参考文献1~4に全て記載されている。2.0 MUSES CN プロジェクト
NASA は JPL に対し、MUSES C に関する共同研究における NASA 側の実施を依頼した。JPL では、この目的のために MUSES CN(N は NASA の略)プロジェクトが設立された。JPL における MUSES CN の活動は、
- 1)科学
- 2)ミッション支援
- 3)ローバーの開発・運用
という3つの技術分野に分かれている。
科学部門は、以下の3つの異なる活動を通じて、NASAおよび一般市民に科学情報を提供する責任を負う。
- 1) ローバー科学
- 2) MUSES C 周回機科学
- 3) サンプル科学
MUSES CN 科学チームは、日本の同僚、ローバー運用チーム、周回機運用チームと協力してこれらの任務を遂行する。MUSES CN プロジェクトの科学活動は、NASA が採取した小惑星サンプルが NASA の科学者による調査のために米国に返還される2007年まで続く。NASA は最近、ローバー搭載機器の科学チームメンバー、周回機搭載機器の共同研究者、そして日本でのサンプル採取地点の選定、初期サンプル分析、特性評価、保管、分割に参加する科学者1名を選定した。MUSES CN 科学チームのメンバーを表1に示す。
名前 役職 Dr. Don Yeomans, JPL プロジェクトサイエンティスト Dr. Peter Smith,
University of Arizonaチームリーダー
MUSES CN ローバー カメラ調査Dr. Beth Clark,
Cornell Universityチームリーダー
MUSES CN ローバー 調査Dr. Thanasis Economou,
University of Chicagoチームリーダー
MUSES CN ローバー アルファX調査Dr. David Tholen,
University of Hawaiiチームメンバー
MUSES C オービター カメラ調査Dr. Faith Vilas, NASA
Johnson Space Centerチームメンバー
MUSES C オービター 近赤外線分光器調査Dr. AndrewCheng,
Johns Hopkins University Applied
Physics Laboratoryチームメンバー
MUSES C オービター LIDAR 調査Dr. Michael Zolensky,
NASA Johnson Space Centerチームメンバー
MUSES C オービター サンプル調査MUSES CNプロジェクトのミッションサポート部門は、以下の作業を実施する責任を負う。
- 1) サンプル回収
- 2) DSNインターフェース
- 3) ナビゲーション
- 4) MUSES C 耐熱シールドの設計レビューと試験
- 5) NEPA(国家環境政策法のこと。MUSES C サンプルカプセルを米国本土で回収するには、その要件を遵守する必要がある)
MUSES CN 航法支援は、MUSES C プロジェクトを支援するために、以下の重要なミッションイベントにおける MUSES C 宇宙機の軌道(位置と速度)の推定値を提供する。
- 1) 打ち上げと初期捕捉
- 2) 地球から小惑星への軌道変更マヌーバ
- 3) 小惑星から地球への軌道変更マヌーバ
- 4) 地球への再突入
MUSES CN サンプル回収モジュールは、ISAS および米国空軍と協力し、MUSES C サンプル回収カプセル(SRC)が地球への再突入目標を定め、SRC が提案された着陸地点[ユタ試験訓練場(UTTR)]に許容可能な最大着陸面積で着陸するように調整する。 MUSES C SRC 着陸は、NASA の惑星保護要件にも適合していなければならない。NASA ARC における MUSES C チートシールド材料の試験は完了済み。
3.0 MUSES CN ミッション
MUSES CNローバーミッションは、ローバー(図1)が MUSES C 宇宙機から 1989ML に射出されることで始まる。1989ML の公称特性は表2に、公称ミッションパラメータは表3に示されています。射出前まで、太陽電池式のローバーはオービタ載型ローバー機器(OMRE)内に搭載されている。宇宙船に取り付けられている間は、ローバーは太陽光から遮蔽される。OMRE はローバーと宇宙船のインターフェイスであり、ローバーと OMRE 間の通信用アンテナ/受信機とデータ転送用データラインを備えている。ローバーは平均して1日あたり 2Mbit のデータを宇宙船に送信する。科学・工学データは、工学チームおよび科学チームとの協議に基づき、適切に圧縮される。
ローバーが宇宙船から投下されると、表面に着地する前に数回跳ね返ると予想される。1989MLの微小重力環境では、数十mの高さから落下した後、秒速1cmで表面に衝突する際の衝撃は、地球上で数 mm 落下するのと大差ない。その後、ローバーは自動的に姿勢を調整する。低重力環境のため、ローバーが表面との接触を失わずに移動できる最高速度は 1.5mm/秒程度。ローバーは、ひっくり返った場合でも自力で起き上がるように設計されている。4本の可動支柱はそれぞれ独立しているため、ローバーは任意の方向に向けることができる。可動ミラーと作動式フォーカス機構により、パノラマ画像も顕微鏡画像も撮影できる。
表2. 1989ML 公称特性
特徴 値 絶対等級 19.5 アルベド限界 0.04〜0.15 有効半径 (km) 0.2〜0.4 かさ密度 1〜4 自転周期 (hrs) 19 スペクトル型 Xc 脱出速度 (m/sec) 0.15〜0.60 表面重力 (cm/sec2 (0.56〜4.5)×103 近日点 (AU) 1.10 遠日点 (AU) 1.45 公転周期 1.44 表3. 1989ML でのミッション遂行
ミッション段階 日付 期間 (週) 太陽からの
距離 (AU)小惑星からの
距離 (km)初期取得と利益 2003/10/20〜
2003/11/22 1.11 20〜50 地図作成 2003/11/3〜
2003/12/146 1.11 20 サンプル取得と
ローバー投下2003/1215〜2004/1/15 4 1.1 0〜20 延長科学探査 2004/1/16〜
2004/4/1413 1.7 0〜20 1989ML から出発 2004/4/15 1.33 --- ローバーの主な科学目標は、搭載機器一式を用いて科学測定を実施し、小惑星の「夜」の前にデータを送信することである。夜の間は、ローバーは日の出までシャットダウンする。ローバーには不揮発性ストレージがほとんど搭載されておらず、日々の調査スケジュール終了時にオービターに送信されなかったデータのほとんどは失われる。日々の調査に含まれるものは、地形や関心対象物の目視画像撮影、赤外線による点スペクトル測定、AXS スペクトル測定、そしてローバーを計測機器として用いた土壌力学調査がある。
小惑星の自転軸の太陽に対する向きを理解することは、ローバーを表面に配置して運用期間を最大限に確保する上で極めて重要となる。技術実験として、ローバーは低重力下で表面を「跳ねる」または「かすめる」ように走行できる機能を備えるよう設計されている。これらの実験が成功すれば、ローバーは長距離(10~100m)を移動できる可能性がある。この動作により、ローバーは昼の領域に長く留まり、より多くのデータを取得し、熱サイクルを回避できる可能性がある。ローバーは、サンプル採取行程で残されたクレーターの1つ以上に到達し、内部を調査することで、採取したサンプルでは失われてしまう地層構造を明らかにしようと試みる。 またローバーは衝突過程によるサンプルの変化の証拠も探す。ローバーのミッションはオービターが 1989ML を離れる時点で終了する予定。
図1. MUSES CN プロトタイプ
4.0 MUSES CN ローバー
MUSES CNローバーは、マーズパスファインダー計画で使用されたソジャーナローバーの製造に用いられた技術の直接の後継であり、質量は10分の1に抑えられ、科学計測のための機能がさらに強化されている。ISAS が NASA ペイロードに割り当てた総質量はわずか 2.7kg。MUSES CN ローバーの目的は、まずローバーの移動性と小型化の実験、次に科学計測を可能にするためのものであり、この目標の順序は、パスファインダーのソジャーナーローバーと同様である。
ローバーの主な特性を表4に示す。ローバー本体の重量は約 1300g だが、残りの 2700g は MUSES C 宇宙機に搭載された軌道周回機搭載ローバー装置(OMRE)によって消費される。OMRE は以下の機能を提供する。
- 1) 巡航中のローバーの熱制御
- 2) 打ち上げ時および巡航中のローバーの宇宙船への取り付け
- 3) 小惑星到達時のローバーの宇宙船からの放出
- 4) 軌道周回機からローバーへのコマンド送信
- 5) ローバーからのデータ受信と、軌道周回機への送信(そのリプレイが地球へ送られる)
- 6) OMRE コンピュータの搭載
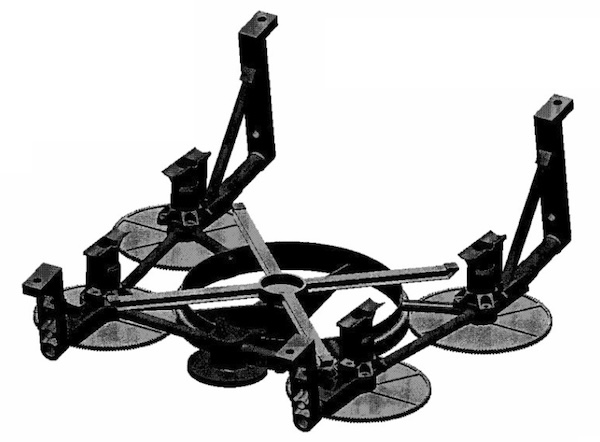
OMRE の構造と放出機構を図2に示す。
図2 (OMRE画像)放出機構と構造
表4. ローバーの特性
ローバーの特性 値 質量 1300g 大きさ 14×14×6cm 発電能力 2.3W (通常発電率) 最大速度
a) 接地時
ホップ・スキム時
1.5mm/s
10cm/sデータ通信速度
(OMRE受信機から 20km)4800bps ローバーは、14×14×6cm の長方形の本体と、可動式の支柱4本に取り付けられた4つの車輪で構成される(図1参照)。車輪は直径 6.5cm で、支柱に取り付けられる。支柱は、本体の対向する2つの 14×6cm 面の中心から伸びるハブから2本ずつ伸びる。各支柱の長さは、支柱の中心から車輪軸の中心まで 7cm。ローバー本体の6面のうち4面には、発電用の太陽電池が設置される。上面には、無線信号を送信するために必要なアンテナ素子も備えられる。ローバーは、電源が供給され、MUSES C 宇宙機に搭載された OMRE と直接見通しが確保されている限り通信できる。
ローバーは、外側の6面すべてに光学検出器を搭載する。これらの検出器を用いて、ローバーは太陽の方向を特定できる。小惑星の微小重力場を測定でき、かつローバーの質量制限内に収まる加速度計が利用できないため、垂直方向のセンシングは不可能である。ローバーにはレーザー距離計が搭載されており、近くの物体までの距離を測定できる。これは、ソジャーナローバーと併用して科学・工学上の目標物、危険物、その他の物体の3次元位置を特定するために使用された、マストに取り付けられたステレオ着陸機カメラと同様の機能を果たす。
ローバーには、可視カメラ、近赤外線分光計、アルファX線分光計の3つの科学機器が搭載される。これらの機器の機能性能を表5、6、7に示す。カメラと近赤外線分光計には前面に観察窓が設けられる。アルファX線分光計(AXS)センサーは、ローバーの後方に向かって展開し、適切なボディ/支柱の動きによって岩石またはレゴリスに接触する。
ローバーシステム全体は、ミッション中の最悪の状況を想定した-18℃から+11℃の温度範囲での動作試験を受けている。ローバーの機械的環境は、ISAS MV ロケットによる振動環境によって大きく左右される。MVは「全段固体燃料オールソリッド」設計のため、比較的「乗り心地が悪い」という特徴がある。保守的な設計として、ローバーの機械部品は 100G、OMRE は 125G の耐荷重を想定してる。ローバー全体は、約 25krad の放射線量に耐えられるように設計されているが、多くの部品はこれよりもはるかに高い放射線量に耐えることになる。
4.1 電子サブシステム
航行用電子機器は、ハネウェル社の耐放射線ファウンドリ生産ラインで製造された Synova R3000 32ビット飛行用プロセッサと、耐放射線カスタムゲートアレイをベースとしている。さらに、2M バイトの耐放射線 RAM と 1M バイトの耐放射線 EEPROM が搭載される。プロセッサとメモリ部品の耐放射線性は、想定される最悪の環境(約25krad)を容易に上回る。電子機器の入出力には、カメラインターフェース、10個の3相ブラシレス極低温真空モーターの制御、赤外線分光計およびアルファX線分光計、汎用デジタルおよびアナログ入出力が含まれる。微小重力環境では、ローバーが地表との転がり接触を維持するためには、約1mm/秒の速度までスムーズに加速する必要があるため、モーターは極めて低速で動作できる必要がある。また、重要な技術実験の一つとして、ローバーが小惑星の表面を「跳ねる」ことができるようにすることが挙げられ、そのためには車輪と支柱が毎秒20センチメートルの速度に対応できる必要があるかもしれない。この幅広いモータ回転速度に対応するため、3000:1 のダイナミックレンジで制御可能な3相擬似正弦波コントローラが使用される。32エントリのルックアップテーブルによる正弦波近似を用いることで、各モータのローターを32段階の角度位置にステップさせることができる。各ギヤードモータには256:1のギアヘッドが搭載されているため、出力軸を8000段階以上のステップで制御することが可能。電子機器は、質量と基板面積を削減するために、両面実装の「チップオンボード」パッケージで実装される。OMRE の電子機器は、実装と機能においてローバーの電子機器と非常に類似しています。OMRE の電子機器は、モータードライバーや EEPROM の容量はローバーほど多くはないが、MUSES C 衛星のデータおよび電源サブシステムとのインターフェースを円滑に行うための追加機能を備える。
4.2 電源サブシステム
ミッション環境は非常に低温であるため、ローバーにはバッテリーは搭載されておらず、直射日光のみで動作する。日食中は休眠状態となり、EEPROM に保存された情報と地球との通信に基づいて、再起動時に状態を回復します。日中は、ローバーは上部、下部、前面、背面パネルを覆う太陽電池によって電力供給さる。太陽電池は、効率約 25% の最新鋭の多接合型太陽電池となる見込み。各太陽電池には、反射防止コーティングを施したカバーガラスが取り付けられます。また、各セルには、影による影響を防ぐためのダイオードが設けられる。太陽電池列は、温度と負荷に応じて12~30ボルトの電力を生成する。放射線照射後、高温環境下における上部パネルの最大発電量は、1.1天文単位(AU)で約 2.4W になると予想される。
4.3 機械サブシステム
ローバーの機械サブシステムは、光学ベンチを中心に機能的に配置される。光学ベンチは、アルミニウム合金製の2枚のパネルで構成されており、その間に以下のアセンブリが取り付けられる。
- 1) ジンバルミラー
- 2) カメラ/フィルターホイール
- 3) 赤外線分光計
- 4) 折り畳みミラー/ヘッドランプ
- 5) アルファX線分光計
ルーペレンズを駆動する機構は、光学ベンチの上部に取り付けらる。電子回路基板は光学ベンチ上部パネルからスペーサーを介して取り付けられ、無線回路基板は光学ベンチ下部パネルに取り付けられる。ローバー用のモーターは、この用途向けに特別に開発された。モーターは3相ブラシレス DC モーターで、規定トルクは1オンス、寿命は-200℃~125℃の温度範囲で2億回転。モーター1個(ギアボックスを含む)の質量は10グラムです。各支柱には2個のモーターが搭載される。一方のモーターは車輪を軸を中心に回転させ、もう一方のモーターは支柱をハブを中心に回転させる。車輪は、細い導体と絶縁体からなる複雑な構造で、機械的な車輪としての機能と、小惑星表面への近接センサーとしての機能の両方を果たすように設計されている。肩部のハブには、位置情報を取得するためのポテンショメータが組み込まれている。上面、下面、側面のパネルは太陽電池の基板としても機能し、光学ベンチから熱的に絶縁される。側面のパネルは光学ベンチに接続されており、放熱器として機能し、光学ベンチパネル間に設置された機器に適した温度環境を提供する。
4.4 通信サブシステム
MUSES CN 無線機は、時分割複信方式のLバンド(1900 MHz PCS)無線トランシーバーで、非コヒーレント復調、マンチェスター符号化、バイナリ周波数偏移変調方式を用いて毎秒9600シンボルで動作する。最大消費電力は、単一の +5 V DCバスから750 mW です。この無線機は、耐放射線性を確保するために主に市販の GaAs パッケージ部品を使用して実装され、単一の基板に実装される。クロックリカバリやマンチェスター復号などのいくつかの無線機能は、耐放射線 FPGA で実装される。ローバーアンテナは、オフセットピン給電を備えた右旋円偏波の正方形パッチアンテナで、高誘電率セラミック基板上に配置される。ローバー無線機は、MUSES C 宇宙機に搭載された OMRE 内の同一の無線機と通信する。
4.5 光学サブシステム
MUSES CN ローバーの光学サブシステムは、カメラと赤外線分光計で構成される。ジンバルミラーを備えた3ポジションフォーカスカメラを使用することで、ローバーは固定されたカメラの指向軸上にある領域に焦点を合わせるのではなく、焦点が合っている領域にカメラを向けることができる。この方式により、パノラマモザイク画像を簡単に取得できるだけでなく、分光計をカメラでボアサイト調整するすべての利点を、それに伴う複雑さなしに得ることができる。公称フォーカス範囲は約6メートルです。2つのクローズアップレンズを光学経路に機械的に挿入することで、フォーカス位置を2メートルと 70mm に変更し、超近接画像を撮影できる。
指向可能なミラーは、2軸ジンバルに取り付けられた光学的な平面楕円ミラーである。ミラーの背面には小型の永久磁石が取り付けられる。ジンバルアセンブリには、3つの直交軸それぞれに対称なコイルペアが配置されるように、ワイヤーコイルが巻かれている。コイルに電流が流れると(同じ軸上の巻線は接続されているため、実質的には3つのコイルしかない)、ミラー上の永久磁石に任意の方向に磁場を印加できる。永久磁石はこの印加された磁場に合わせようとし、ジンバル内のミラーを任意の方向に回転させる。ミラーの大まかな位置は印加された磁場に合わせられていると想定でき、すべての微調整情報はジンバルミラーを通して撮影されたカメラ画像から得られるため、ジンバルからのエンコーディングやその他のフィードバックは必要ない。ジンバルミラーは、ローバー前面の光学的に平面な窓を通して外を見ることができ、軸から最大30度まで任意の方向を見ることができる。ジンバルミラーは、様々な方向からの光をカメラまたは赤外線分光計に導くために使用できる。
可視光カメラは、カスタム設計の 30mm F2 トリプレットアクロマートレンズを備えた 256x256 アクティブピクセルセンサー(APS)である。ダイクロイックミラーは、公称水平横軸から APS 検出器までの垂直軸に光路を折り曲げます。9つのフィルター位置を持つフィルターホイールが、APS 検出器パッケージとダイクロイックミラーの間に配置されている。赤外線はダイクロイックミラーを直接通過しますが、可視光はカメラに反射される。APS 検出器の各ピクセルは 11.9μm 四方である。フィルファクターを含む量子効率は約 15% で、ウェル深さは電子約40,000個分である。カメラの視野は 0.1 ラジアン、解像度は0.4ミリラジアン/ピクセル。ジンバルミラーを使用すると、完全な1ラジアン正方形モザイクは 10x10 の画像アレイになる。
小惑星表面の候補科学ターゲットまでの距離を測定するために、測距センサーが搭載されている。カメラアセンブリ内のボアサイト調整されたレーザーダイオードが測距センサーとして機能し、約 10m までの必要な正確な距離データを提供する。赤外線レーザー光はダイクロイックミラー(レーザー波長では約 90% の透過率、10% の反射率を持ち、可視スペクトルの短波長ではほぼ 100% 反射率を持つ)を通過し、レンズによって 15mm の開口部全体に平行なビームに連結される。このビームは、遭遇するあらゆる地形上に 15mm のスポットを生成し、カメラで撮影できる。スポットのサイズは固定されており既知であるため、画像上のスポットの見かけのサイズによって、そのスポットの地形までの距離が一意に決定される。正確に測定できる最小のスポットは約3ピクセル幅で、15mm ビームは 12.6m で3ピクセルの視野を持つ。スポット径は約 0.1 ピクセルまで測定できるため、測距センサーの精度は1 2.6m で約3%、5m で約 1% となる。
スポットサイズは距離に関係なく 15mm に固定されているため、このスポットに当たる太陽光の量も一定である。太陽から1天文単位(ほとんどの小型天体探査ミッションにおける最悪のケース)では、太陽光はこのスポットに 250mW の光を照射する。カメラのフィルターホイールに適切なフィルターを装着すれば、ローバーの動作温度範囲全体にわたってレーザー光を透過させつつ、太陽光の約 90% を遮断できる(レーザー波長は 1K あたり約 0.3nm 変化するため、設計上の動作温度範囲である -125℃~+125℃ に対応するには、約 100nm のフィルター幅が必要)。したがって地形がレーザービームに対して垂直入射する場合、レーザースポットは太陽光の約10倍の明るさになるが、実際には斜入射が一般的である。このケースに対処するため、ソジャーナ探査機と同様に画像差分法を用いる。レーザー照射をオフにした画像からオンにした画像を差し引くことで、レーザー光とノイズを含む画像が得られる。
4.6 移動サブシステム
ローバーの移動サブシステム(4つの車輪、4つの支柱)は、テストのために地球の重力下で通常の移動機能と姿勢制御機能をサポートするように設計されており、また、想定される最悪のケースである小惑星の重力環境下で大きな跳躍を可能にするようにも設計されている。ローバーの移動システムは、電源が失われた場合でもローバーの機械的構成を維持する。ローバーのシャーシは、自己復元機能や逆さまに操作可能な関節式車両のための「可動支柱」シャーシのコンセプトに基づく。これには、転倒からの回復機能と、カメラ/機器の向きを制御するための姿勢制御機能が含まれる。自由回転軸を使用しないため(微小重力環境では摩擦が大きすぎて自由に回転できないため)、極めて低い重力下での動作が実現される。
各ストラット/ホイールアセンブリには、ホイールが地面に接触していることを推測するセンサーも搭載される。このセンサーは、車両が4輪で走行できるようにすること(パッシブサスペンションのない4輪車の場合、本来は3輪で走行することになる)、いずれかのホイールが障害物に遭遇したことを検出すること、4輪すべてが地面を蹴って「跳ねる」ことで車体に大きな角運動量が加わらないようにすること、そして跳ね上がりの着地のほんの一瞬前に接触を予測するために使用される。
1989ML の表面重力は 5~50μG、脱出速度は 0.15~0.6m/s と予想されている。10μgの環境を持つ標準的な小惑星では、1300グラムのローバーにかかる重力は約 0.13 グラムとなる。小惑星の表面特性に用いられるモデルによっては、この低い通常の重力は、従来の車輪付き車両にとって特定の移動上の問題を引き起こす可能性がある。表面が従来の摩擦(例えばクーロン摩擦)を持つとモデル化されている場合、小惑星環境における車両の移動特性は、地球上のオフロード車のダイナミクスのスローモーション版となる。コンピュータシミュレーションによると、車両が小惑星表面の0.5cmの隆起にぶつかると、車両は車両1台分以上空中に飛び上がり、頻繁に横転する。こうした理由に加え、母機から数十メートルの高度で射出されることを想定しているため、ローバーは自己復元機能を備え、逆さまの状態でも動作できるように設計されている。
ローバーを近隣の目標地点まで正確に移動させるため、ローバーはゆっくりと転がります。ローバーの精密な位置決めは、毎秒約 1.5mm 程度の低速での通常の転がり運動によって行われる。この速度では、重力(公称 20μG )やその他の力(ファンデルワールス力、静電気力など)によって、ローバーは常に少なくとも2つの車輪を地面に接触させた状態を維持できると考えられる。接触センシングにより、瞬間的に地面に接触している車輪の走行距離測定は非常に正確(-5%)になるはずである。この正確な走行距離測定と太陽から得られる方位情報を組み合わせることで、地表上の選択された目標地点まで比較的正確かつ低速な移動が可能になります。より長距離の移動には、ホッピングやジャンプが用いられる可能性がある。
5.0 まとめ
NASA と ISAS は、ISAS の MUSES C ミッションにおける協力に尽力している。この協力は、両宇宙機関にとって大きな利益となる。協力内容は、科学、ミッション支援、ハードウェアの納入・運用など多岐にわたります。ISAS の MUSES C ミッションは、小惑星サンプルリターンミッションとしては初の試みであり、NASA の MUSES CN ミッションは、小天体の微小重力環境下でローバーを運用する初のミッションとなる。MUSES CN ローバーは、パスファインダー・ソジャーナーローバーよりも質量が10分の1で、より多くの科学機器を搭載する。MUSES CN ローバーは、小惑星の微小重力環境下で、転がったり、跳ねたり、体勢を立て直したりできる。
MUSES C ミッションと MUSES CN ミッションは、いずれも積極的な技術実証目標を掲げるとともに、小惑星の性質と起源に関する多くの重要な科学調査を可能にするものであり、中でも最も重要なのは、地球近傍小惑星のサンプルを採取し、地球に持ち帰ることである。これらのミッションは、技術面と科学面だけでなく、両国の一般市民やメディアからも大きな注目を集めることが予想される。NASA と ISAS による MUSES C ミッションにおける広範な協力は、両宇宙機関が将来の惑星探査ミッションにおける協力関係を築くための貴重な経験となるだろう。
MUSES C 宇宙機の設計は現在、飛行モデル設計段階の最終段階に入っており、2000年から飛行用ハードウェアの製造が開始される予定。MUSES CN ローバーは先日、クリティカルデザインレビューを完了し、現在、飛行用部品およびアセンブリの製造と調達を行っている。両プロジェクトには、開発および運用上のリスクを伴う多数の新しい技術的進歩が含まる。両プロジェクトは、リスクを管理し、約束された技術的および科学的成果を実現するために尽力している。
参考文献
(略)表5. ローバーのカメラ 機能パフォーマンス
パラメータ 要求 希望 ローバーの
現状の設計無限のコントラストを持つ
局所表面における空間分解能1cm/ピクセル未満かつ隣接するピクセル間の
コントラスト比が5:1以上1mm/ピクセル未満かつ隣接ピクセル間の
コントラスト比が10:170mmクローズアップレンズ使用時で0.047mm/ピクセル。
10:1のコントラスト比よりもはるかに優れている有効被写界深度
(1cm/ピクセル以上の空間解像度の場合)0.1m〜10m 0~∞
(地上分解能1cm未満、または 1mrad/ピクセル)0~12mで1~6mm/ピクセル、
12m以上で 0.7mrad/ピクセル画像ノイズ RMS 値:フルスケールの 2% 未満 RMS 値:フルスケールの 0.5% 未満 RMS 値:フルスケールの 0.5% 未満 (273K 未満の時) 分光範囲 500〜900nm 350〜950nm 予想される 400~950nm の範囲で9つのフィルタ位置 表6 ローバーの近赤外線分光器 機能パフォーマンス
パラメータ 要求 希望 ローバーの
現状の設計分光範囲 1.0〜1.6μm 0.8〜1.7μm 0.8〜1.7μm 解像度
(吸収の最小局在化精度)20nm 5nm 隣接ピクセル間のコントラストが3:1以上3で.5 nm/ピクセル、
4ピクセル以上で 100:1 以上ノイズ RMS 値:フルスケールの 2% 未満 RMS 値:フルスケールの 0.3% 未満 RMS 値:フルスケールの 1% 未満 (273K 未満の時) 表7. ローバーのアルファX線分光器 機能パフォーマンス
パラメータ 要求 希望 ローバーの
現状の設計アルファエネルギー範囲 0.5〜5 0.4 (炭素)〜6 (鉄、ニッケル) 0.4〜6 アルファ線分解能 (半値全幅) 500keV 未満 50keV 未満 273K未満かつ2時間積分で -100keV X線エネルギー範囲 (keV) 2未満〜10以上 1〜12 1〜12 X線分解能 (半値全幅) 分光全般で1000eV 未満 5.9keV ラインで 160〜190eV 273K未満かつ2時間積分、5.9keV ラインで 300eV